Bienvenidos a un nuevo proyecto con Arduino, en este proyecto veremos como podemos crear un sensor de aparcamiento con Arduino, el cual aumentará la frecuencia de los pitidos a medida que acerquemos la mano, además, hablaremos de los diferentes materiales empleados en su construcción, se mostrará un esquema de conexiones y finalmente podréis encontrar el código para poder controlar el sensor de ultrasonidos.
Tabla de contenidos
Materiales empleados en el sensor de aparcamiento
A continuación encontrarás los diferentes materiales que vas a utilizar para realizar el sensor de aparcamiento con Arduino y una breve descripción de los mismos. Además, para todos aquellos que estéis interesados en realizar el proyecto, podéis pinchar en las imágenes y os llevará a una web donde poder adquirir dichos materiales.
Placa de Arduino UNO: Es el cerebro de nuestro proyecto, encargada de controlar todos los procesos del mismo mediante el código que encontrarás más adelante.
Protoboard: Tabla con orificios (pines) la cual está conectada internamente y usaremos para realizar nuestras conexiones para el proyecto.
Modulo de ultrasonidos: se encarga de enviar y recibir señales sonoras y calcula la distancia de los objetos en función del tiempo que tardan en volver dichas señales.
Zumbador pasivo o buzzer: Se trata de un elemento con una membrana que vibra cuando se la alimenta con un potencial de corriente.
Cables con pines: Estos cables tienen unos pines (macho o hembra) los cuales nos permitirán hacer las conexiones entre los diferentes elementos ya mencionados.
Componentes necesarios para este proyecto
Si lo que buscas es ver de una forma mucho más detallada de como realizar este proyecto desde el inicio hasta el final y una explicación del código, a continuación se muestra el video con dicho contenido, mucho mas visual y fácil de comprender. Y recuerda, si te gusta esta clase de contenido, no olvides suscribirte.






En calidad de Afiliado de Amazon, RobotUNO obtiene ingresos por las compras adscritas que cumplen los requisitos aplicables.
DESARROLLAMOS TU IDEA
¿Necesitas ayuda con algún proyecto?

- Prototipado y MVPs
- Arduino y ESP32
- Diseño de PCBs
- Diseño de piezas 3D
- Conexión Bluetooth
- Estudio de Viabilidad
- Optimización de costes
- Asesoría Técnica
- Internet de las Cosas
- Gestión de Patentes
Esquema de conexiones Arduino para la construcción del sensor de aparcamiento
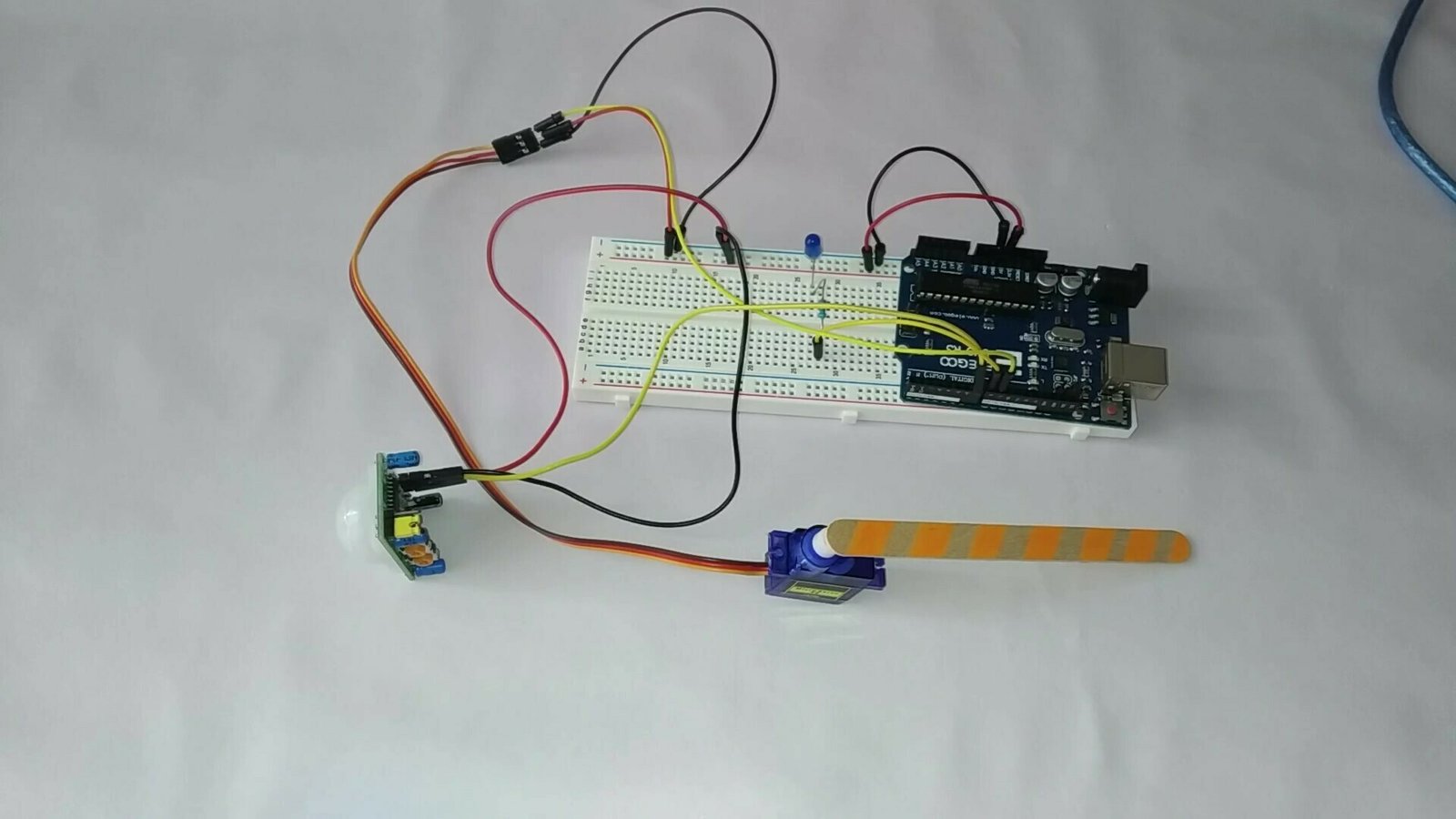
Una de las partes más importantes a la hora de realizar nuestro montaje del sensor de aparcamiento pasa por conectar correctamente los diferentes elementos. Con el fin de evitar errores de montaje o conexiones erróneas, a continuación te dejamos el esquema de conexiones empleado para este proyecto, con este esquema de conexiones es posible usar el código que puedes encontrar al final del post sin necesidad de hacer ninguna modificación.

Código de Arduino para la programación del sensor de aparcamiento con Arduino
A continuación se muestra el código de programación desarrollado específicamente para este proyecto. Los pines que puedes encontrar en el código son los mismos que encontrarás en el esquema de conexiones previamente mostrado.
Si quieres una explicación más detallada de las diferentes partes del código empleado para programar este sensor y de su funcionamiento, te recomiendo que te veas el video que te hemos dejado más arriba.
Si tienes dudas sobre cómo usar o instalar el entorno de programación empleado para Arduino, te dejamos un link de comó descargar el IDE de Arduino
//Canal de YouTube -> RobotUNO
//Sensor de aparcamiento con Arduino
int TRIG = 10;
int ECO = 9;
int LED = 3;
int DURACION;
int DISTANCIA;
void setup(){
pinMode(TRIG, OUTPUT);
pinMode(ECO, INPUT);
pinMode(LED, OUTPUT);
Serial.begin(9600); //Numero de bits por segundo = 9600
}
void loop(){
digitalWrite(TRIG, HIGH);
delay(1);
digitalWrite(TRIG, LOW);
DURACION = pulseIn(ECO, HIGH);
DISTANCIA = DURACION / 58.2; //Valor especificado por el fabricante
Serial.println(DISTANCIA);
delay(200);
if(DISTANCIA<=20 && DISTANCIA >= 0){
digitalWrite(LED, HIGH);
delay(DISTANCIA * 10);
digitalWrite(LED, LOW);
}
}